Simula tu brazo manipulador en ARTE y prográmalo en RAPID
9 septiembre 2013
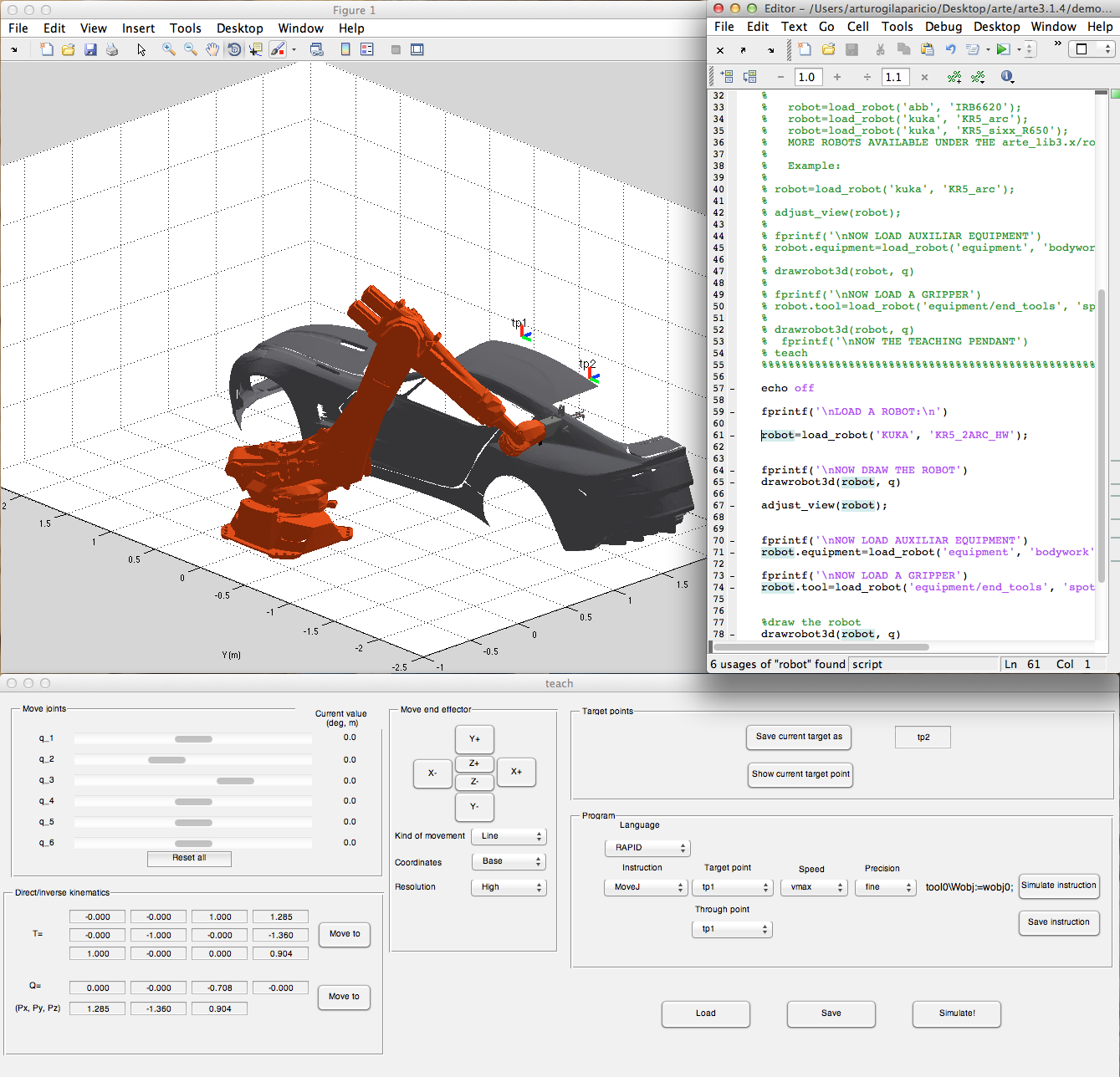
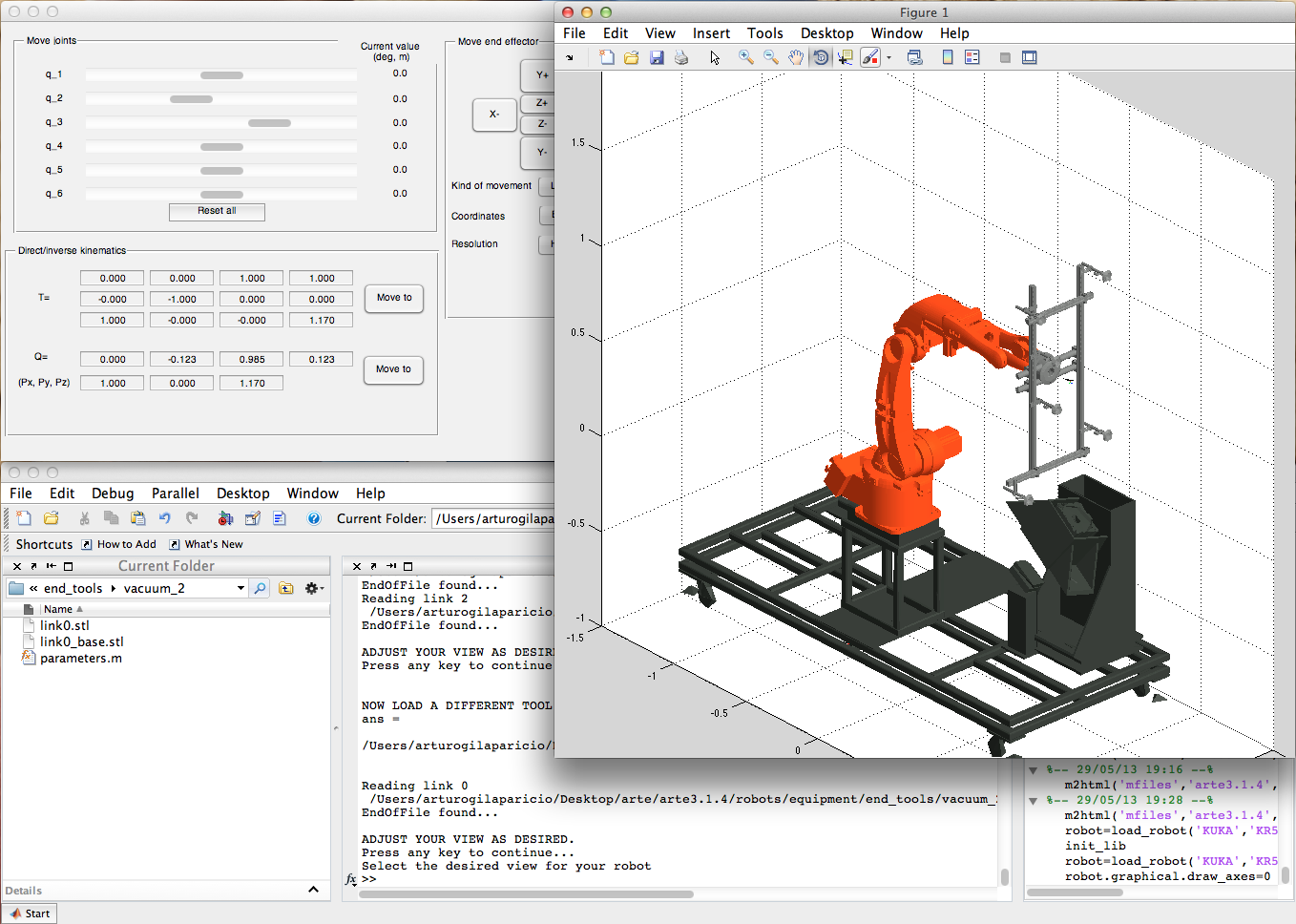
La versión 3.1.5 de ARTE incluye un intérprete Matlab-RAPID y RAPID-Matlab. De esta manera la librería se puede utilizar para la simulación de las trayectorias que realizará cualquier robot industrial ABB cuando se programa en RAPID.
Por ejemplo, se puede cargar un robot dentro del entorno de Matlab. Adicionalmente, la librería incluye elementos accesorios para entornos de fabricación como cintas transportadoras o celdas robóticas. Un conjunto de elementos terminales también están disponibles, como pinzas de soldadura, elementos terminales basados en vacío o grippers (míralo en Youtube). Matlab permite depurar dentro de su editor/depurador el código y simular el robot en un entorno virtual. A continuación, ARTE traducirá el programa a RAPID para, así, poder programar el robot físico.
Observa una aplicación final de envasado ealizada por compañeros de años anteriores.